深入思考FairMOT及其变体
创新点1:Conflict-Aware Multi-Task Optimization for Object Tracking
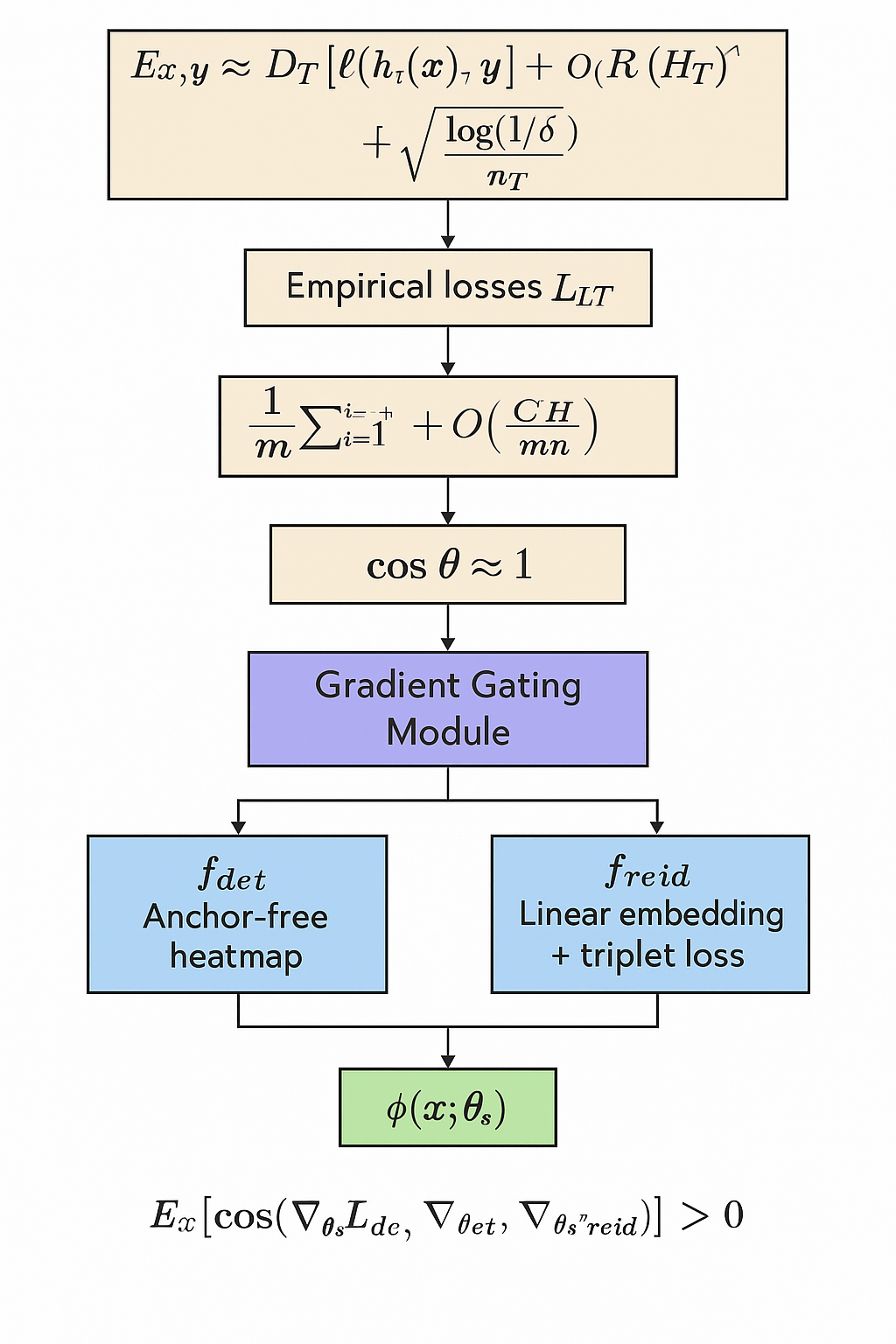
$$\mathbb{E}_{x,y\sim\mathcal{D}_T}[\ell(h_T(x),y)]\leq\hat{\mathcal{L}}_T+\mathcal{R}_T(H_T)+\mathcal{O}\left(\sqrt{\frac{\log(1/\delta)}{n_T}}\right)$$
$\hat{\mathcal{L}}_T$ 是经验损失;
ℛT(HT) 是假设空间 HT 的 Rademacher 复杂度。
设 m 个任务,平均每个任务有 n 个样本,H 是共享表示的函数类:
$$\mathbb{E}_T\left[\mathbb{E}_{x,y\sim\mathcal{D}_T}[\ell(h_T(x),y)]\right]\leq\frac{1}{m}\sum_{i=1}^m\hat{\mathcal{L}}_{T_i}+\mathcal{O}\left(\frac{C(H)}{\sqrt{mn}}\right)$$
相比单任务的 $\mathcal{O}(1/\sqrt{n})$,MTL 将样本数放大为 mn。
从多任务学习框架,我们可以得知,多任务学习(MTL)通过共享表示来提高学习效率,然而这一假设的前提是,任务关联性越大越好。即式子中C(H)不可以太大!如果两个任务的共性过低,共享表示会导致性能显著下降。(例如你给一个人布置俩任务,又让他当模特保持身材,又让他比赛相扑增加体重,可想而知这个人的学习必然是不顺利的),在数学上我们可以得出如下的推论
$$C(H) \downarrow \rightarrow \cos\theta=\frac{\langle\nabla_{\theta_s}\mathcal{L}_{\det},\nabla_{\theta_s}\mathcal{L}_{\mathrm{reid}}\rangle}{\|\nabla_{\theta_s}\mathcal{L}_{\det}\|\cdot\|\nabla_{\theta_s}\mathcal{L}_{\mathrm{reid}}\|}\approx1$$
出于这一理论,我们可以设计一个梯度门控模块
fdet 为 anchor-free heatmap 分支;
freid 为 linear embedding + triplet loss;
两个任务共享 θs,目标是构造一个在联合分布 𝒟joint 上最优的 ϕ(x; θs)与最优的优化策略。
通过动态调节特征通路,理论上可以保证任务损失方向一致性,即
𝔼x[cos (∇θsℒdet, ∇θsℒreid)] > 0
其中,冲突计算模块实时计算夹角(极低时间复杂度,可以忽略不计) $$\theta(x)=\arccos\left(\frac{\langle\nabla_{\theta_s}\mathcal{L}_{\det}(x),\nabla_{\theta_s}\mathcal{L}_{\mathrm{reid}}(x)\rangle}{\|\cdot\|\|\cdot\|}\right)$$
自适应特征解耦模块(Adaptive Feature Routing)引入门控设置:
ϕdet(x) = G(θ(x)) ⋅ ϕ(x), ϕreid(x) = (1 − G(θ(x))) ⋅ ϕ(x)
其中 G(θ) 是一个门控函数,例如: $$G(\theta)=\frac{1}{1+\exp(-\alpha(\theta-\beta))}$$ 或者 G(θ) = σ(a ⋅ (θ − π/4)) 当梯度方向相近(θ 小)→ 更多共享;
冲突时(θ 大)→ 更多解耦。
也就是损失函数保持不变,但共享特征使用带门控的 ϕdet, ϕreid 进行学习。
用到的所有算法总结
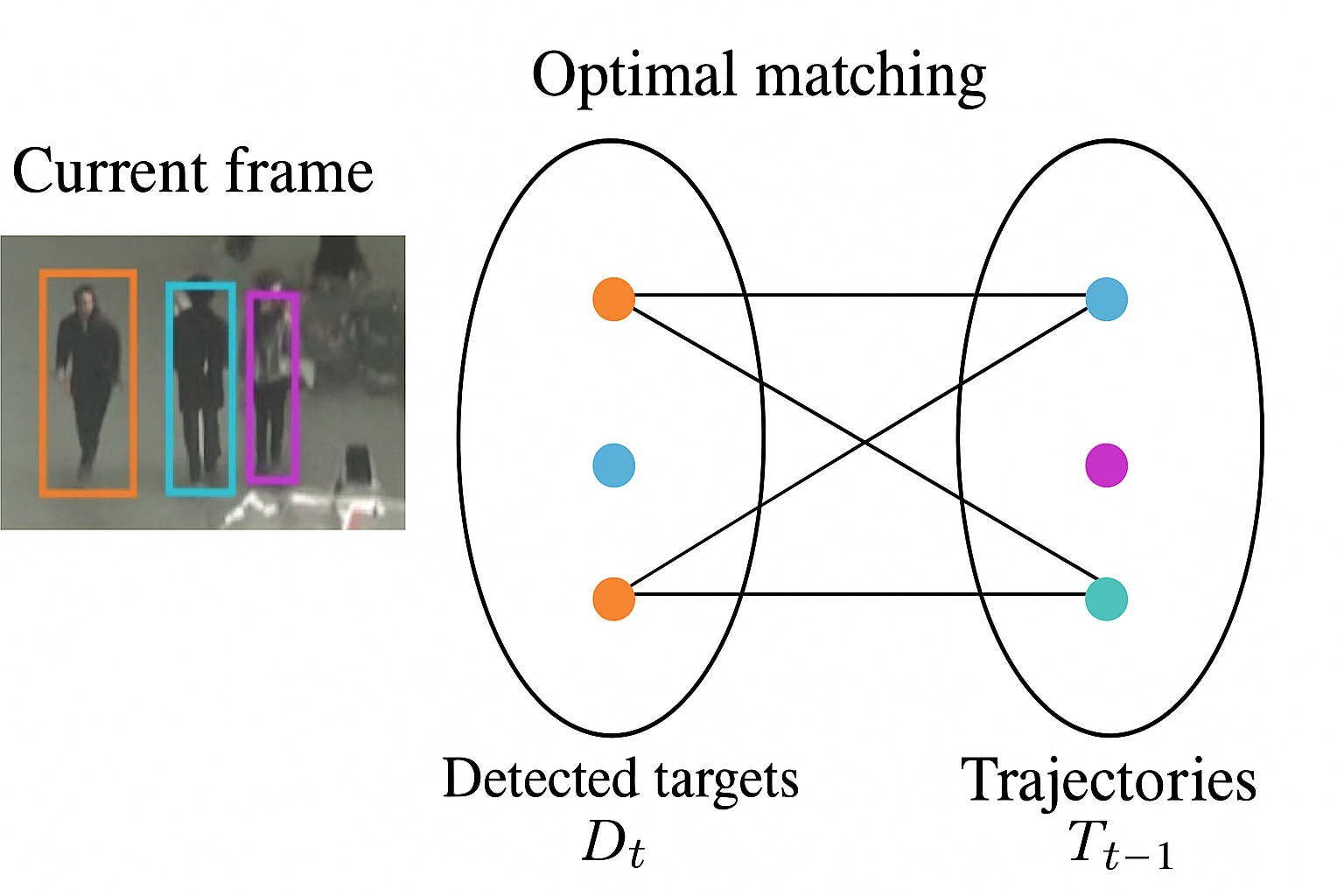
核心算法1:匈牙利算法用于reID的匹配
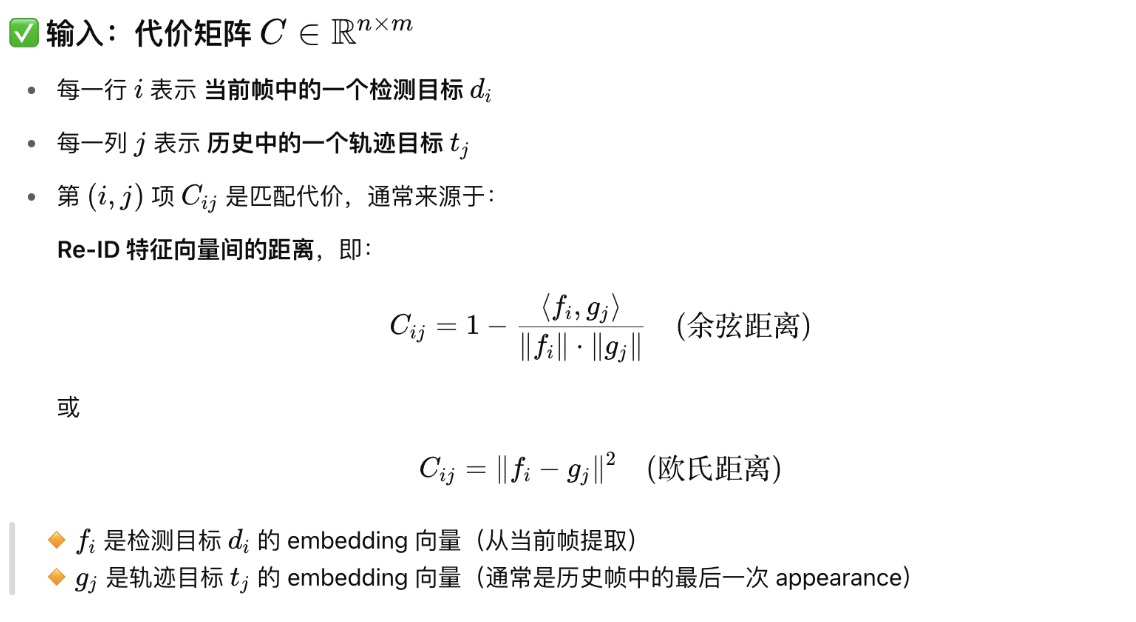
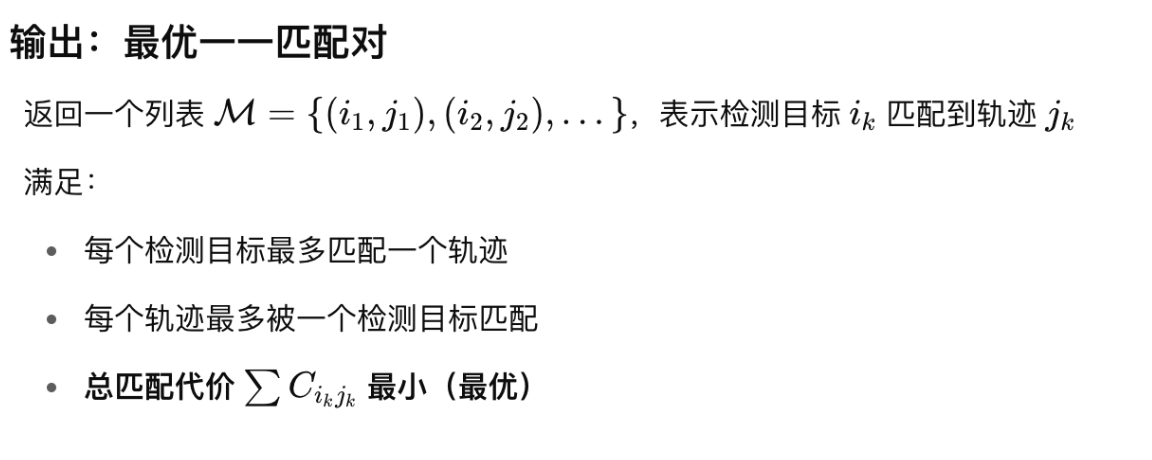
匈牙利算法用于解决二分图最大匹配问题,在这里用于目标检测中的匹配任务。
核心算法2:共享的backbone
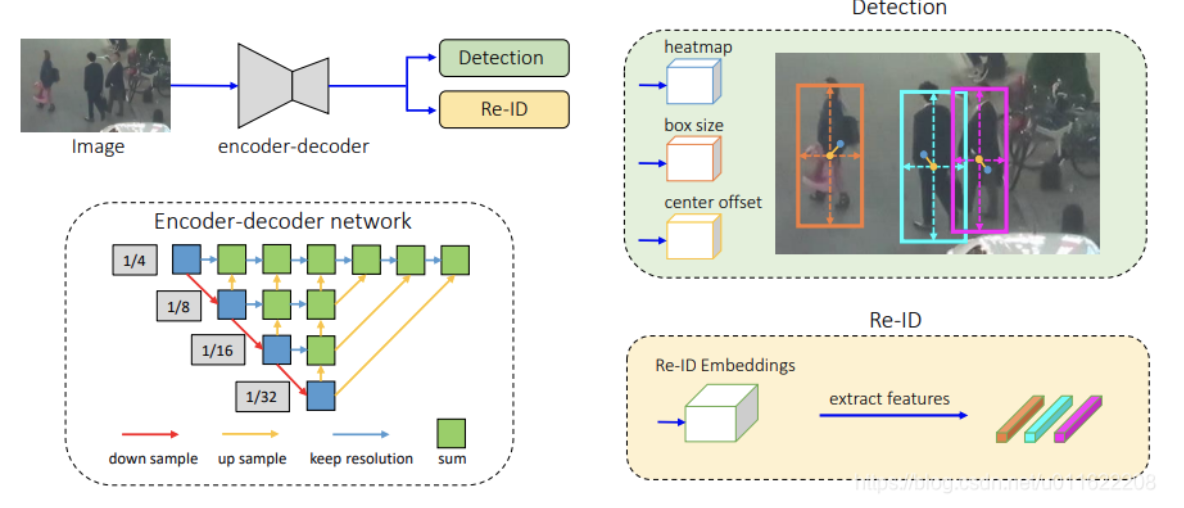
- 输入,经过卷积或其他操作后蕴含高级语义的图像特征图,
- 输出,一个Embedding,蕴含着两大任务:detection和reID所需要的信息。
核心算法3,4,5:统计所有卷积块的作用
算法输入:图像特征图,或者说前面提取出来的Embedding
算法输出:对于每个检测目标,我们希望网络预测出三个量:
| 名称 | 含义 | 数学符号 | 监督目标来源 | 维度 |
|---|---|---|---|---|
| Heatmap | 目标中心点概率分布图(高斯图) | Ŷheat ∈ [0, 1]H × W × C | 目标中心点位置 | 每类1通道,共C类 |
| Box Size | 对应中心点的物体宽高 | Ŷsize ∈ ℝH × W × 2 | GT框尺寸 (w, h) | 2通道 |
| Offset | 浮点中心点误差补偿 | Ŷoff ∈ ℝH × W × 2 | 像素坐标非整点偏移 | 2通道 |
这里的 H, W 是输出特征图尺寸(输入图像下采样后的尺寸)
1. Heatmap:预测目标中心点
目标是生成一个类似于热力图的分布,对于每个目标中心点,在其对应位置生成一个高斯峰:
GT 中一个目标中心是 (xi, yi)
将它映射到特征图坐标系:(x̂i, ŷi) = (⌊xi/s⌋, ⌊yi/s⌋),s 是下采样倍数
在 (x̂i, ŷi) 周围画一个 半径为 r 的高斯核
构造 heatmap Ŷ ∈ [0, 1]H × W:中心为 1,周围值小于 1
使用focalloss计算损失
$$\mathcal{L}_{\mathrm{focal}}=\begin{cases}(1-\hat{p}_{xy})^\alpha\log(\hat{p}_{xy})&\mathrm{if}\hat{Y}_{xy}=1\\(1-\hat{Y}_{xy})^\beta(\hat{p}_{xy})^\alpha\log(1-\hat{p}_{xy})&\mathrm{otherwise}\end{cases}$$
其中
p̂xy 是网络预测的 heatmap 值
(x, y) 是中心点(或邻域点)
α, β 控制正负样本权重
2. Box Size:目标框的 w, h
在每个中心点位置 (i, j) 回归其 GT box 的宽高:
Ŷsize[i, j] = (w, h)
只在目标中心点上进行监督,损失函数使用 ℓ1 或 smooth-ℓ1:
$$ \mathcal{L}_{\text{size}} = \frac{1}{N} \sum_{(i,j) \in \text{centers}} \left\| \hat{Y}_{\text{size}}[i,j] - (w, h) \right\|_1 $$
Offset:浮点中心点补偿
下采样后特征图中只能以整点预测中心点,但实际的中心点坐标是浮点型,所以我们要预测精确位置的偏移量,中心点偏移(offset)是为了补偿下采样导致的小数精度损失。
$$ \hat{Y}_{\text{off}}[i,j] = \left( \frac{x}{s} - \lfloor \frac{x}{s} \rfloor, \frac{y}{s} - \lfloor \frac{y}{s} \rfloor \right) $$
损失函数也是 ℓ1 回归:
$$ \mathcal{L}_{\text{off}} = \frac{1}{N} \sum_{(i,j) \in \text{centers}} \left\| \hat{Y}_{\text{off}}[i,j] - \Delta \right\|_1 $$
网络结构直接输出这三个量
网络 backbone(如 DLA-34)提取 feature map;
然后通过三个 卷积 head(可以是1-2层的 conv)分别输出:
Head 输出通道数 用于监督 Heatmap Head C Focal loss Size Head 2 box loss Offset Head 2 offset loss
1 | |
算法输入是什么?
最终,网络需要对 每个位置 回归:
- 该位置是否为物体中心点(Heatmap)
- 如果是中心点,对应的框大小(Box Size)
- 和实际中心点浮点坐标的偏差(Offset)
1 | |
参考文献
[1] Kuhn H W. The Hungarian method for the assignment problem[J]. Naval research logistics quarterly, 1955, 2(1‐2): 83-97.
[2] Cormen T H, Leiserson C E, Rivest R L, et al. Introduction to algorithms[M]. MIT press, 2022.
1 | |