源头活水:multilabel-learning(持续更新)
本文持续更新作者在多标签学习领域总结的经典方法(baseline)
MLKNN
ML-KNN 是张敏灵,周志华的大作,是一种基于传统 KNN 的多标签分类扩展算法。 它结合了 KNN 和 贝叶斯推断(Bayesian inference),用于多标签问题,即一个样本可以同时属于多个类别。
基本步骤:
- 先找出每个测试样本的 K 个最近邻。
- 对每个标签,通过 最大后验概率(MAP)推断,判断该标签是否应该赋予这个样本。
为了推导清晰,先设符号:
- ℒ = {l1, l2, ..., lq}:总共有 q 个标签。
- x:测试样本。
- 𝒩(x):x 的 K 个最近邻。
- cj ∈ {0, 1}:样本是否属于第 j 个标签。1表示有,0表示没有。
- nj:在邻居中,有多少个邻居拥有标签 lj。
对于每个标签 lj,我们希望计算:
P(cj = 1 ∣ nj) 和 P(cj = 0 ∣ nj)
即:
- 给定 nj 个邻居拥有标签 lj,样本自己拥有/不拥有标签 lj 的概率。
最后,比较两者大小:
- 如果 P(cj = 1 ∣ nj) > P(cj = 0 ∣ nj),就预测有标签。
- 否则预测没有标签。
根据贝叶斯公式:
$$ P(c_j \mid n_j) = \frac{P(n_j \mid c_j) \, P(c_j)}{P(n_j)} $$
注意:
P(nj) 在 cj = 1 和 cj = 0 的情况下是相同的,因此只比较分子就可以!
所以,只需要计算:
- P(cj = 1),先验概率
- P(nj ∣ cj = 1),似然概率
- 同理 cj = 0 时也计算一遍。
从训练集中直接统计得到:
$$ P(c_j=1) = \frac{\text{样本中有标签 } l_j \text{ 的样本数} + s}{\text{总样本数} + 2s} $$
$$ P(c_j=0) = \frac{\text{样本中无标签 } l_j \text{ 的样本数} + s}{\text{总样本数} + 2s} $$
其中 s 是平滑参数(通常 s = 1,防止除零问题)。
同样通过统计得到:
- P(nj ∣ cj = 1):在拥有标签 lj 的样本中,K个邻居中有 nj 个拥有标签的概率。
- P(nj ∣ cj = 0):在没有标签 lj 的样本中,K个邻居中有 nj 个拥有标签的概率。
具体估计公式:
$$ P(n_j \mid c_j=1) = \frac{\text{在有标签的样本中,邻居数为 } n_j \text{ 的样本数} + s}{\text{有标签的样本总数} + (K+1)s} $$
$$ P(n_j \mid c_j=0) = \frac{\text{在无标签的样本中,邻居数为 } n_j \text{ 的样本数} + s}{\text{无标签的样本总数} + (K+1)s} $$
注意:K + 1 是因为 nj 可能取值 0, 1, ..., K,一共有 K + 1 个取值。
对每个测试样本 x,每个标签 lj:
找出 K 个最近邻,统计 nj。
计算:
- P(cj = 1),P(cj = 0)
- P(nj ∣ cj = 1),P(nj ∣ cj = 0)
计算后验:
- P(cj = 1 ∣ nj) ∝ P(nj ∣ cj = 1) × P(cj = 1)
- P(cj = 0 ∣ nj) ∝ P(nj ∣ cj = 0) × P(cj = 0)
比较大小,选择最大概率的标签预测。
其实最终判断只用比较:
P(nj ∣ cj = 1) × P(cj = 1) vs P(nj ∣ cj = 0) × P(cj = 0)
事实上,MLKNN是利用局部邻居信息,对先验概率(标签占比)进行后验修正。这一方法事实上是单纯的单标签方法,因为这一点,MLKNN也一直收到批评。但是MLKNN是一种懒学习方法,对计算资源要求较低,而且效果相当的不错。
RAKEL
RAKEL是一种集成学习算法,其实是LP方法的进一步发展。LP方法就是把多标签转化为多分类问题,具体的是:把每一种标签组合看成一类,共2标签个数 − 1类。RAKEL为了缓解指数爆炸,通过构建多个子模型并综合结果来提升性能。其关键是通过随机选择标签子集(k-labELset)来捕捉标签间的局部相关性,避免全局计算的复杂性。
算法步骤 1. 生成随机标签子集: •
随机选择大小为k的标签子集(如k=3),生成m个子集,确保每个原始标签被覆盖多次。
• 例如:共有5个标签(A,B,C,D,E),生成子集{A,B,C}、{B,D,E}、{A,C,E}等。
训练子模型: • 对每个k-labELset,使用标签幂集方法将其转换为多类分类问题。
• 例如:子集{A,B,C}对应8种可能的组合(2^3),训练一个基分类器(如SVM)识别这些组合。实际上解决一个多分类问题
集成预测: • 对测试样本,每个基分类器预测其子集内的标签组合。
• 通过投票机制汇总结果:统计每个标签的预测频次,超过阈值则判定为关联。
参数选择 • k值:通常取3-5,过小可能忽略依赖,过大增加计算量。
•
子集数量m:需足够覆盖所有标签,经验公式为m ≈ 2L(L为总标签数)。
RAKEL vs. 其他方法对比
| 方法 | 处理标签相关性 | 计算复杂度 | 适用场景 |
|---|---|---|---|
| 二元关联 (BR) | 忽略 | 低 | 标签独立性强 |
| 分类器链 (CC) | 顺序依赖 | 中 | 标签有明确顺序依赖 |
| 标签幂集 (LP) | 全局组合 | 高 | 标签数较少(<20) |
| RAKEL | 局部组合 | 中-高 | 中等规模标签(20-100) |
分类器链(CC)-> ECC(集成分类器链)
分类器链(Classifier Chains, CC)
算法流程 1. 定义标签顺序:
• 按自然顺序(如标签出现频率)或随机生成顺序(如 y2 → y5 → y1 → ...)。
训练阶段:
• 对每个标签 yi:◦ 输入:原始特征 X + 前面标签的真实值 y1, y2, ..., yi − 1(训练时使用真实标签)。
◦ 输出:训练一个二分类器(如逻辑回归、SVM)预测 yi。
预测阶段:
• 迭代预测:- 预测 y1:输入仅原始特征 X。
- 预测 y2:输入
X + ŷ1(ŷ1 是 y1 的预测值)。
- 依此类推,直到预测完所有标签。
• 注意:预测时使用前序标签的预测值(而非真实值),因此误差会沿链传播。
- 预测 y1:输入仅原始特征 X。
示例说明 任务:音乐分类,标签为 {摇滚, 激烈,
人声}。
• 标签顺序:摇滚 → 激烈 → 人声。
• 预测过程:
- 预测“摇滚”:输入歌曲特征 → 输出 1(是摇滚)。
- 预测“激烈”:输入歌曲特征 + 摇滚=1 → 输出 1(激烈)。
- 预测“人声”:输入歌曲特征 + 摇滚=1 + 激烈=1 → 输出
0(无人声)。
• 结果:标签为 {摇滚, 激烈}。
优点 1.
捕捉标签依赖:显式利用前序标签信息,提升相关性强的标签预测精度。
2. 灵活性:兼容任意二分类算法作为基分类器。
3. 计算可控:复杂度为 O(L),适用于中等规模标签(L < 100)。
缺点 1.
误差传播:前序标签预测错误会导致后续标签误差累积。
• 例如:若“摇滚”误判为 0,后续“激烈”可能被错误预测为 0。
- 顺序敏感性:标签顺序影响模型性能,但最优顺序难以确定。
- 并行性差:链式结构需顺序预测,难以加速。
- 若标签间独立性较强(如商品属性“颜色”“尺寸”),引入标签作为特征可能引入噪声!
一种成功的改进方法是引入集成学习,创建ECC,通过多条分类器连链投票减少单条分类器链的误差。
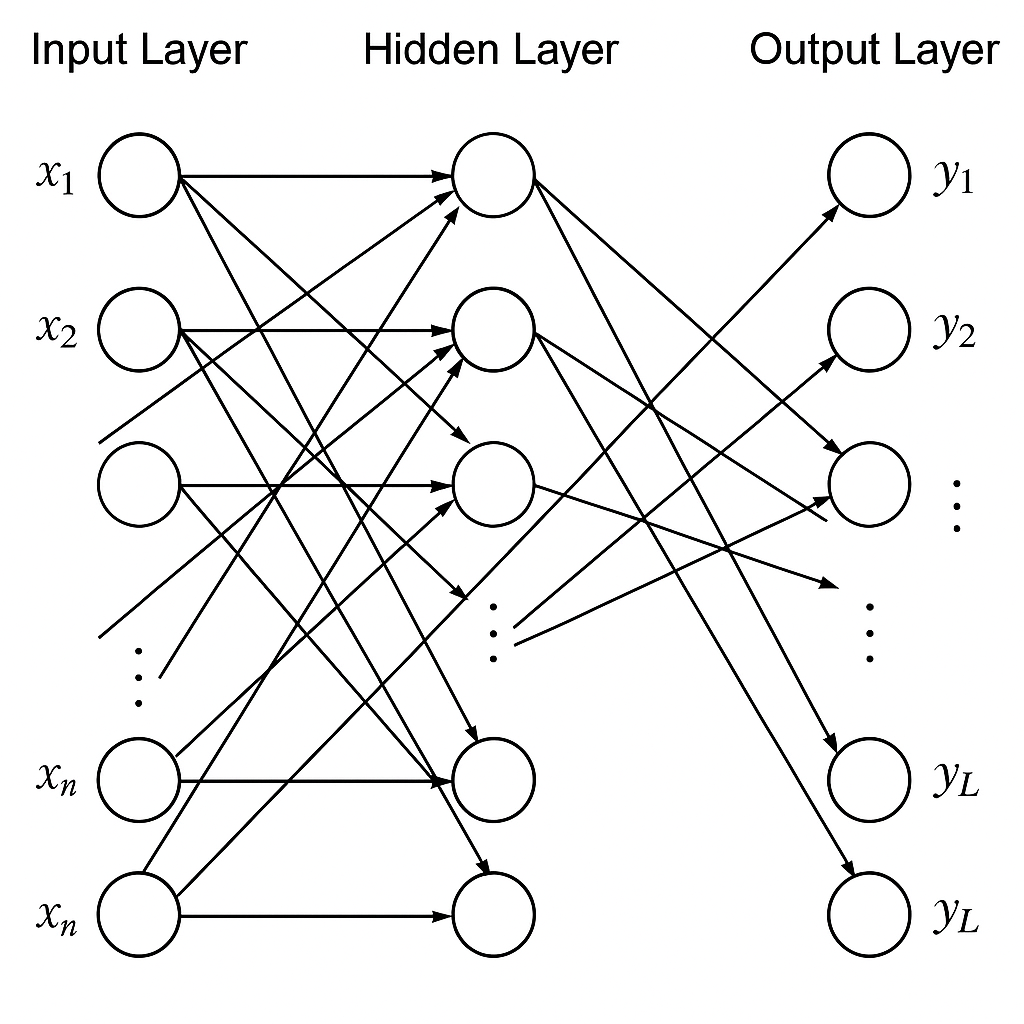
BPMLL
BPMLL(Backpropagation for Multi-Label Learning)详解
BPMLL 是一种基于神经网络的多标签分类算法,通过优化标签排序损失函数直接建模多标签间的复杂依赖关系
算法原理
输出层:每个标签对应一个神经元,输出值表示该标签的相关性得分(未归一化)。
2. 损失函数 BPMLL 使用成对排序损失函数(Pairwise Ranking Loss),目标是让相关标签的得分高于无关标签的得分。具体公式如下:
$$ \text{Loss} = \sum_{i=1}^N \sum_{(y^+, y^-) \in Y_i^+ \times Y_i^-} \exp\big(-(f(x_i, y^+) - f(x_i, y^-))\big) $$ • N:样本数。
• Yi+:样本 i 的相关标签集合。
• Yi−:样本 i 的无关标签集合。
• f(xi, y):网络对样本 xi 在标签 y 上的得分。
优化目标:最小化相关标签与无关标签的得分差异,使得对每个样本,所有相关标签的得分均高于无关标签。
3. 训练流程 1. 前向传播:计算所有标签的得分。
2. 损失计算:根据成对排序损失,计算所有相关-无关标签对的损失。
3. 反向传播:通过梯度下降更新网络权重。
4. 预测:对测试样本,按标签得分从高到低排序,取前 k 个或超过阈值的标签。
优点 1. 捕捉标签依赖:
通过全局优化直接建模标签间复杂的依赖关系(如排斥、共现),无需手动设计链式或组合策略。
2. 排序信息利用:
输出标签的排序结果,适用于需要优先级判断的场景(如推荐系统)。
3. 灵活性高:
兼容任意神经网络结构(如 CNN、RNN),适合处理图像、文本等复杂数据。
缺点 1. 计算复杂度高:
成对损失需要对所有相关-无关标签对计算损失,当标签数 L 较大时,复杂度为 O(L2),训练效率低。
例如:若 L = 1000,每样本需处理约 500 × 500 = 250, 000
对,计算量巨大。
2. 阈值敏感:
预测时需设定阈值或选择前 k
个标签,阈值选择影响最终性能。
代码 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38import torch
import torch.nn as nn
import torch.optim as optim
class BPMLL(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(BPMLL, self).__init__()
self.fc1 = nn.Linear(input_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, output_dim)
self.relu = nn.ReLU()
def forward(self, x):
x = self.relu(self.fc1(x))
x = self.fc2(x)
return x
def bp_mll_loss(outputs, targets):
loss = 0.0
for i in range(outputs.size(0)):
pos = targets[i] == 1
neg = targets[i] == 0
for y_plus in outputs[i][pos].tolist():
for y_minus in outputs[i][neg].tolist():
loss += torch.exp(-(y_plus - y_minus))
return loss / outputs.size(0)
model = BPMLL(input_dim=100, hidden_dim=64, output_dim=10)
optimizer = optim.Adam(model.parameters(), lr=0.001)
for epoch in range(100):
for X_batch, y_batch in dataloader:
scores = model(X_batch)
loss = bp_mll_loss(scores, y_batch)
optimizer.zero_grad()
loss.backward()
optimizer.step()
SVM发展得来的方法
1.1Rank-SVM
我们想要将svm方法引入多标签问题,rank-svm是一个成功的例子。 针对多标签学习问题(实例可同时关联多个标签),Rank-SVM通过引入排序机制扩展传统SVM。其核心思想为:对每个标签学习独立的分类器,并通过约束强制正标签得分高于负标签。
设数据集包含Q个标签,优化问题表述为: $$ \begin{aligned} \min_{\boldsymbol{w}_k,\xi_{ikl}} &\quad \frac{1}{2}\sum_{k=1}^Q \|\boldsymbol{w}_k\|^2 + C\sum_{i=1}^m \frac{1}{|Y_i||\bar{Y}_i|}\sum_{(k,l)\in Y_i\times\bar{Y}_i} \xi_{ikl} \\ \text{s.t.} &\quad \langle \boldsymbol{w}_k, \boldsymbol{x}_i \rangle - \langle \boldsymbol{w}_l, \boldsymbol{x}_i \rangle \geq 1 - \xi_{ikl} \\ &\quad \xi_{ikl} \geq 0,\quad \forall i\in\{1,...,m\},\ (k,l)\in Y_i\times\bar{Y}_i \end{aligned} $$
- 排序约束:对每个样本xi,其相关标签k ∈ Yi的得分需高于无关标签l ∈ Ȳi至少1个边际单位
- 正则化项:$\frac{1}{2}\sum\|\boldsymbol{w}_k\|^2$控制模型复杂度,防止过拟合
- 排序损失:∑ξikl量化违反排序约束的惩罚,系数$\frac{1}{|Y_i||\bar{Y}_i|}$实现样本间归一化
时间复杂度分析
相较于单标签SVM,Rank-SVM复杂度显著增加:每个样本产生|Yi|×|Ȳi|个约束,总约束数达: $$ N_{\text{constr}} = \sum_{i=1}^m |Y_i|(Q-|Y_i|) \approx O(mQ^2) $$ 当标签数Q较大时,约束规模呈平方增长问题求解的时间复杂度为: O(Nconstr3) = O(m3Q6)
1.2 KNN加权单SVM分类器
多标签TSVM加权
介绍两种结构用于建模label信息。
local geometric information
对于标签r定义两种边。i,j是对应于label:r的实例,而l是不对应label:r的实例。
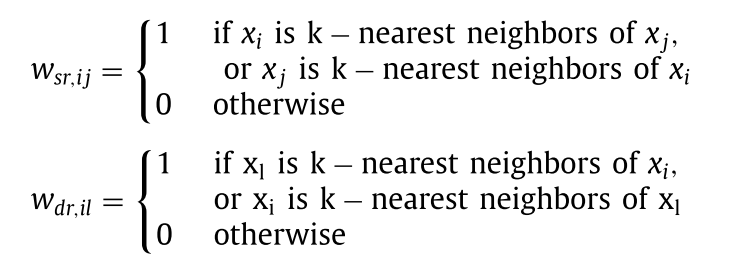
第一种边对应r的类内关系,第二种边对应r内与非r样本的类间关系。
作者还定义了 $$f_{rl}=\begin{cases}1&\mathrm{if~}\exists i,w_{dr,il}\neq0\\0&\mathrm{otherwise}&\end{cases}$$ 用于衡量类r与任意的非r样本l之间的关系,若l在kNN的意义上距离r类足够近则该边为1.
structural information in samples
对于任意一个类r,将其ward聚类为若干个簇Ci,定义 $$\begin{aligned}&u_{C_{i}}=\frac{1}{|C_i|}\sum_{x_j\in C_i}x_j\\&\Sigma_{C_{i}}=\frac{1}{|C_i|}\sum_{x_j\in C_i}\left(x_j-u_{C_i}\right)\left(x_j-u_{C_i}\right)^T\end{aligned}$$ 并以矩阵 Σr = ΣC1 + … + ΣCΛr 定义结构信息。
作者最终模型是这样的 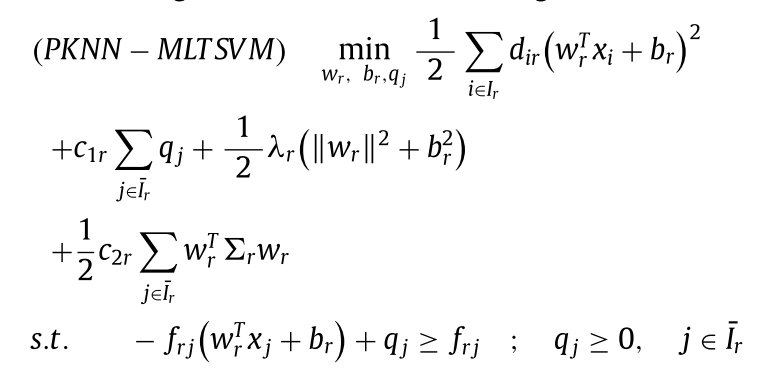
加权在以下 个方面
dir = ∑j ∈ Irwsr, ij加权距离贴近,与上篇类似,用有多少个KNN近邻点衡量样本xi之于label : r的重要性,邻居越多则越该被正确分类。
项 $\frac{1}{2}c_{2r}\sum_{j\in\bar{I}_r}w_r^T\Sigma_rw_r$ 的目的是通过结构化正则化约束分类超平面,使其与类别 r 的数据分布特性对齐。具体解释如下(deepseek):
1. 协方差矩阵 Σr 的物理意义
- 结构信息表示:Σr = ΣC1 + … + ΣCΛr 是类别 r 中所有子簇协方差矩阵的和,反映了该类别数据的整体分布特性。若数据在某一方向上的方差较大(即 Σr 对应特征值较大),则表明该方向数据分布较分散。
- 局部结构捕捉:通过 Ward 聚类将类别 r 划分为多个子簇,Σr 能够刻画类内数据的局部几何结构(如多模态分布或异质子群)。 ### 2. 优化项的作用
- 结构化正则化:该项本质是数据依赖的正则化项,与传统的 L2 正则化(如 ∥wr∥2)不同,它通过 Σr 对不同方向施加自适应的惩罚。
- 若某方向数据方差大(Σr 特征值大),则在该方向上 wr 的权重会被更严格约束,避免过拟合噪声或异常点。
- 若某方向方差小(特征值小),则允许 wr 在该方向有更大权重,从而更贴合数据的紧密分布。
- 理论依据:
这一设计符合结构风险最小化原则,即通过引入先验知识(数据分布的结构信息)来约束模型复杂度,提升泛化能力。类似思想在流形学习(如 LDA 的类内散度矩阵)和鲁棒优化中均有体现。 ### 3. 多标签分类中的意义 在多标签场景下,不同标签可能对应不同的数据分布模式:- 独立性假设:每个标签的超平面独立优化,Σr 仅关注当前标签的数据结构,避免其他标签的干扰。
- 鲁棒性增强:通过显式建模类内结构,超平面能更好适应复杂分布(如多簇、非高斯分布),从>而提升对噪声和异常值的鲁棒性。
- 由于frj用于衡量衡量类r与任意的非r样本l之间的关系,用于增强局部可分性